Introduction
Decision-making in artificial intelligence is often a complex task that requires agents to learn and adapt to dynamic environments. Q-learning, a popular reinforcement learning algorithm, has proven effective in training agents to make decisions based on past experiences. However, in real-world scenarios, the environment may change over time, and the agent needs to continually update its knowledge to make informed decisions. This is where Dyna-Q comes into play.
Understanding Q-Learning
Q-learning is a model-free reinforcement learning algorithm used to optimize decision-making processes. It enables an agent to learn a policy, which maps states to actions, by iteratively updating a Q-table based on the rewards received for different state-action pairs.
The Q-value represents the expected cumulative reward when taking a specific action in a particular state. The Q-learning update equation is given by:
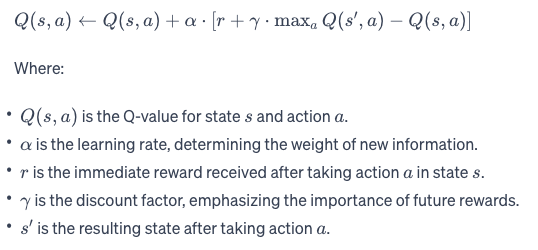
While Q-learning is effective, it may struggle with environments that change dynamically. For example, if the agent encounters a new state or if the rewards for actions change over time, Q-learning might require frequent updates to its Q-table.
Introduction to Dyna-Q
Dyna-Q is an extension of Q-learning that introduces a model-based approach to reinforce learning. It incorporates a simulated model of the environment, allowing the agent to plan ahead and update its Q-table more efficiently.
Dyna-Q consists of three key components:
- Direct RL (Model-Free Learning): This is the traditional Q-learning aspect where the agent learns from its interactions with the environment and updates its Q-table based on the observed rewards.
- Model Learning: The agent builds a model of the environment, capturing the transition dynamics. Given a state-action pair, the model predicts the next state and the associated reward.
- Planning: The agent simulates experiences using its learned model to update the Q-table. This involves repeatedly sampling state-action pairs from the model, predicting the next state and reward, and updating the Q-values accordingly.
Implementing Dyna-Q with Coding Examples
Let’s delve into a simple implementation of Dyna-Q using Python and the OpenAI Gym library. In this example, we’ll use the CartPole environment, a classic reinforcement learning problem.
Step 1: Setting Up the Environment
First, install the OpenAI Gym library if you haven’t already:
pip install gym
Now, let’s create a basic Dyna-Q agent:
import numpy as np
import gymdef __init__(self, env, alpha=0.1, gamma=0.9, epsilon=0.1, planning_steps=5):
self.env = env
self.alpha = alpha
self.gamma = gamma
self.epsilon = epsilon
self.planning_steps = planning_steps
self.action_space_size = env.action_space.n
self.model = {}
if np.random.rand() < self.epsilon:
return self.env.action_space.sample() # Explore
else:
return np.argmax(self.q_table[state, :]) # Exploit
self.q_table[state, action] += self.alpha * (
reward + self.gamma * np.max(self.q_table[next_state, :]) – self.q_table[state, action]
)
if state not in self.model:
self.model[state] = {}
for _ in range(self.planning_steps):
state = np.random.randint(self.state_space_size)
action = np.random.randint(self.action_space_size)
next_state, reward = self.model[state][action]
self.update_q_table(state, action, reward, next_state)
for _ in range(episodes):
state = self.env.reset()
action = self.choose_action(state)
next_state, reward, done, _ = self.env.step(action)
self.update_model(state, action, next_state, reward)
break
env = gym.make(‘CartPole-v1’)
dyna_q_agent = DynaQAgent(env)
dyna_q_agent.train(episodes=1000)
Step 2: Testing the Agent
Now, let’s test the trained Dyna-Q agent:
def test_agent(agent, episodes=10):
for _ in range(episodes):
state = env.reset()
total_reward = 0action = np.argmax(agent.q_table[state, :])
state, reward, done, _ = env.step(action)
total_reward += reward
break
test_agent(dyna_q_agent)
Step 3: Analyzing Results
After training and testing the Dyna-Q agent, you can analyze its performance and observe how the planning steps contribute to improved decision-making in a dynamic environment.
Conclusion
Dyna-Q extends the capabilities of Q-learning by introducing a model-based approach, allowing agents to plan and update their knowledge efficiently in dynamic environments. The integration of model learning and planning steps enhances the decision-making process, making Dyna-Q a powerful tool for solving reinforcement learning problems.
By understanding the underlying principles of Q-learning and Dyna-Q, and by implementing a basic version of the algorithm, you gain insights into how reinforcement learning agents can adapt to changing environments. Further experimentation, parameter tuning, and application to diverse environments can lead to even more robust and efficient decision-making agents.